Abstract
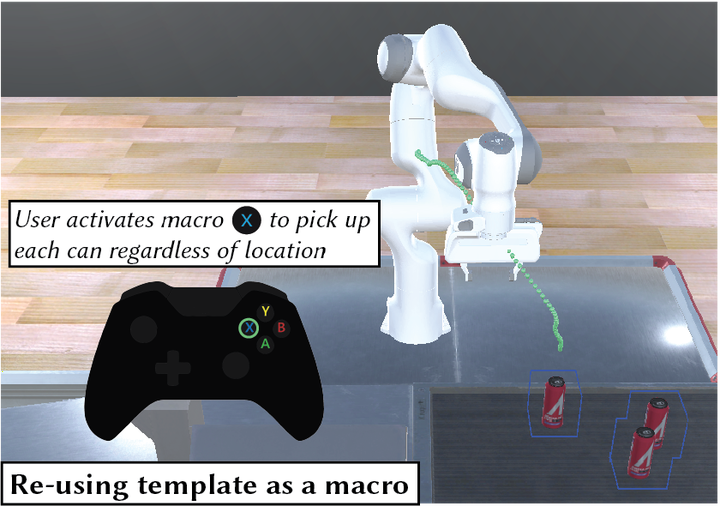
Remote teleoperation is an important robot control method when they cannot operate fully autonomously. Yet, teleoperation presents challenges to effective and full robot utilization: controls are cumbersome, inefficient, and the teleoperator needs to actively attend to the robot and its environment. Inspired by end-user programming, we propose a new interaction paradigm to support robot teleoperation for combinations of repetitive and complex movements. We introduce Mimic, a system that allows teleoperators to demonstrate and save robot trajectories as templates, and re-use them to execute the same action in new situations. Templates can be re-used through (1) macros—parametrized templates assigned to and activated by buttons on the controller, and (2) programs—sequences of parametrized templates that operate autonomously. A user study in a simulated environment showed that after initial set up time, participants completed manipulation tasks faster and more easily compared to traditional direct control.